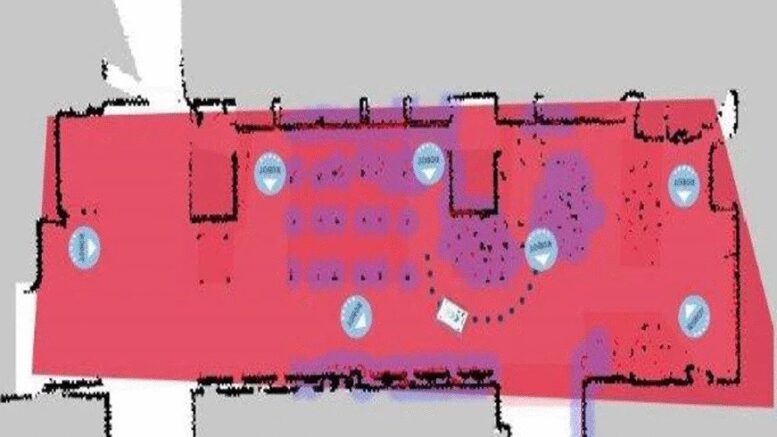
Area map pre-programmed into the UV-C robot in the oncology outpatient clinic. The blue dots indicate where the robot had to stop for 3 minutes during the disinfection cycle. The red color indicates which area was covered by the mapping procedure and exposed to UV-C light. The violet color indicates “light detection and ranging” (Lidar), which is a way for the robot to see an obstacle and avoid that area. Courtesy of Astrid, et al.
Environmental surface decontamination is a crucial tool to prevent the spread of infections in hospitals; however, manual cleaning and disinfection may be insufficient to eliminate pathogens from contaminated surfaces. Ultraviolet-C (UV-C) irradiation deploying autonomous disinfection devices, i.e. robots, are increasingly advertised to complement standard decontamination procedures with concurrent reduction of time and workload. Although the principle of UV-C based disinfection is proven, little is known about the operational details of UV-C disinfection delivered by robots. To explore the impact of a UV-C disinfection robot in the clinical setting, Astrid, et al. (2021) investigated its usability and the effectiveness as an add-on to standard environmental cleaning and disinfection. Additionally, its effect on Candida auris, a yeast pathogen resistant to antifungals and disinfectants, was studied.
After setting the parameters “surface distance” and “exposure time” for each area as given by the manufacturer, the robot moved autonomously and emitted UV-C irradiation in the waiting areas of two hospital outpatient clinics after routine cleaning and/or disinfection. To quantify the efficacy of the robotic UV-C disinfection, the researchers obtained cultures from defined sampling sites in these areas at baseline, after manual cleaning/disinfection and after the use of the robot. Four different C. auris strains at two concentrations and either in a lag or in a stationary growth phase were placed in these areas and exposed to UV-C disinfection as well.
The researchers report, "The UV-C irradiation significantly reduced the microbial growth on the surfaces after manual cleaning and disinfection. C. auris growth in the lag phase was inhibited by the UV-C irradiation but not in the presence of the rim shadows. The effects on C. auris in the stationary phase were differential, but overall C. auris strains were not effectively killed by the standard UV-C disinfection cycle. Regarding usability, the robot’s interface was not intuitive, requiring advanced technical knowledge or intensive training prior to its use. Additionally, the robot required interventions by the technical operator during the disinfection process, e.g. stopping due to unforeseen minor dislocation of items during the clinical service or due to moving individuals, making it a delicate high-tech device but not yet ready for the autonomous use in the clinical routine."
Reference: Astrid F, et al. The use of a UV-C disinfection robot in the routine cleaning process: a field study in an Academic hospital. Antimicrobial Resistance & Infection Control. Vol. 10, article number 84. 2021.
361504 223609I like this internet site very significantly, Its a genuinely nice billet to read and obtain information . 898074